 IPV6 �����
�r�g��2018-09-20 ��Դ��δ֪
IPV6 �����
�r�g��2018-09-20 ��Դ��δ֪
�����Ŀ�ġ�
��Ϥcontiki ����ϵ�y
��ϤIpv6 ��ͨ�Ņf�h
ͨ�^���������stm32w108��ADCʹ�÷���
�����h����
Ipv6���Q������ģ�K
VMware ̓�M�C
PC�C XP��Window7/8
�������ݡ�
6.UI Thread UI���̡���������UI��
�����λ����ADC�����F���r(4��)��server�˰l��ADC�ɼ��Ĕ�����
�����ԭ����
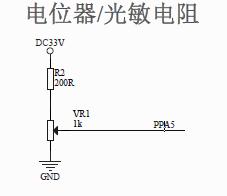
�D �λ��ԭ��D
��ԭ��D��֪���λ�������_�cSTM32W108��PA_5���_���B������оƬ�փ�ADC�¹�����֪PC_5���_������ADC5ͨ���������Ļ����λ����ʹ��PA_5���_�ϵ�늉��r�l��׃����늉�׃����ADֵ׃�������ȡ�
�����E��
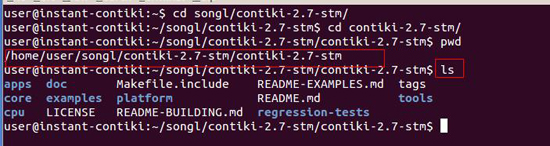
���_VMware̓�Mܛ�������_Ubuntu�R���M��Vi�µ�contiki-2.7-stmĿ��ļ��A������ls���
�M���^���Դ�a�ļ���·������:
/home/user/songl/contiki-2.7-stm/contiki-2.7-stm/examples/mbxxx/rpl-udp-VR

������ֻ����_udp-VR-client.c��udp- VR -server.c�ɂ��ļ���������֮�g��ͨ�Ņf�h��
�����g����
�������
./build.sh
������udp- VR -server.bin��udp- VR -client.bin�ɂ�bin�ļ���
�B���O�����£�Ո���ձ��¹��Ӱ��b����������µ�“�R�����”����ע���κ�ģ�K������������ն˵ĵװ壬ֻ�����server���ɡ��@���\���^���ģ�K�����նˡ�
��������
���ն�(M3�W�P)���� udp-VR-server.bin��
�͑���(�λ��)���� udp-VR-client.bin

�ψDM3�W�Pģ�K�B�ӵ�PC�C�ϣ����_�����{ԇ���鿴���ն˽��յ��Ĕ��������������ă����Ƿ����_��
�����Y����
���ô����{ԇ�����������_�����{ԇ���ߣ�������115200������̖(�����X�Ķ˿�̖)���c�����_��
ע�⣺Ҫ�Ȱ�ģ�K���_�P���_���ȵ��������Д��������֓܄��λ�����@�r�^�촮���{ԇ���ֵĔ�����Ϣ���x����ADֵ���������f���λ���ķֵ�늉�ֵҲ��������
���յ��Ĕ������£�

����ͨ�^���ڰl��21 49 07 FE 56 00 0B B0 00 00 23 7E�����^������_��
21 49�� ���ַ�‘��I’
07 FE ���O���ַ ע�⣺07 ��Ͱ�λ��ַ��FE��߰�λ��ַ
56 ���O����� ‘V’ �����λ��
00 0B B0�� ADC�Ĕ���ֵ��12λADֵ0B�����λ��B0���8λ��
23����ǰ���
7E��У�͡�
���������a��
PROCESS_THREAD(udp_client_process, ev, data)
{
uint8_t result = 0;
uint8_t i = 0;/p>
txbuf[0] = '!';
txbuf[1] = 'I';
txbuf[2] = addresses_L;
txbuf[3] = addresses_H;
txbuf[4] = 'V';
PROCESS_BEGIN();
PROCESS_PAUSE();
// GPIO_DBGCFG |= (1<<5);
set_global_address();
PRINTF("UDP client process started\r\n");
print_local_addresses();
/* new connection with remote host */
client_conn = udp_new(NULL, UIP_HTONS(UDP_SERVER_PORT), NULL);
if(client_conn == NULL) {
PRINTF("No UDP connection available, exiting the process!\r\n");
PROCESS_EXIT();
}
udp_bind(client_conn, UIP_HTONS(UDP_CLIENT_PORT));
PRINTF("Created a connection with the server ");
PRINT6ADDR(&client_conn->ripaddr);
PRINTF(" local/remote port %u/%u\r\n",UIP_HTONS(client_conn->lport), UIP_HTONS(client_conn->rport));
etimer_set(&et_send,CLOCK_SECOND/2);
while(1) {
PROCESS_YIELD();
if(ev == tcpip_event) {
tcpip_handler();
#if 0
if(rxlen == 7)
{
if(rxbuf[0] == '#' && rxbuf[1] == 'C'&& rxbuf[2] == 'I' && rxbuf[3] == 'r' && rxbuf[4] ==addresses_H && rxbuf[5] == addresses_L)
{
if((rxbuf[6] - '0') == Relay_on)
{
halGpioSet(PORTx_PIN(PORTC,2),1);
PRINTF(" Open Relay\n");
flag = 1;
}
else if((rxbuf[6] - '0') == Relay_off)
{
halGpioSet(PORTx_PIN(PORTC,2),0);
PRINTF("Close Relay\n ");
flag = 0;
}
rxlen = 0;
}
}
#endif
}
#if 0
if(ev == serial_line_event_message) {
if(*((uint8_t *)data) == 0x90)
continue;
txbuf[count++] = *((uint8_t *)data);
if (count == 24) {
uip_udp_packet_sendto(client_conn, (char *)txbuf, 24,&server_ipaddr, UIP_HTONS(UDP_SERVER_PORT));
count = 0;
}
}
#endif
if(ev == PROCESS_EVENT_TIMER)
{
unsigned int temp = temperature_sensor.value(0);
txbuf[7] = temp;
txbuf[6] = temp >> 8;
for(i=0;i<(11-2);i++)
{
result ^= txbuf[i+1];
}
txbuf[10] = result;
uip_udp_packet_sendto(client_conn, (char *)txbuf, 11,&server_ipaddr, UIP_HTONS(UDP_SERVER_PORT));
result = 0;
etimer_reset(&et_send);
}
}
PROCESS_END();
}
Client ��������l�͔�������Ҫ�õ�etimer�¼�PROCESS_EVENT_TIMER��etimer_set(&et_send,CLOCK_SECOND*4)�O����Ҫ�ĕr�g;Ĭ�JCLOCK_SECOND 1000 ���룬Ҳ�����fÿ��4��͕��a��һ��PROCESS_EVENT_TIMER�¼����������l��һ���O���B������




