
 ��������W����CRL���ڹ��I�C���˹�������ϵ�y�еěQ��·������
�r�g��2025-04-08 ��Դ���A���hҊ
��������W����CRL���ڹ��I�C���˹�������ϵ�y�еěQ��·������
�r�g��2025-04-08 ��Դ���A���hҊ
�S�����I�Ԅӻ��İlչ�����I�C���������a�еđ���Խ��Խ�V����Ȼ�����C�����ڏ��s�h�����\�Еr�y����F���ϣ���ο��١���Ч�،��F���������ɞ��P�I���}�����y������ه���A�OҎ�t�ҽ��y���m�����s��׃�Ĺ��ψ���������������W����Causal Reinforcement Learning, CRL���ij��F�����Q�@һ���}�ṩ���µ�˼·��
һ����������W����CRL������
��������W����CRL���nj���������c�����W����Y�ϵ�һ�N���d��������ͨ�^��������Pϵ�ķ��������������w���õ�����h���е�׃����������ã��Ķ��������ɿ������߿ɽ���ԵěQ�ߡ��c���y�����W����ȣ�CRL���H�Pע��B�̈́�����߀���]������Pϵ���܉������ޘӱ��ЌW���L������Pϵ����ߛQ�ߵ������ԡ�
�������I�C���˹�������ϵ�y�ĬF���c����
�ڹ��I���a�У��C���˹��Ͽ��܌������aͣ������ɾ��pʧ���F�еĹ�������ϵ�y����ه���A�OҎ�t�ҽ��y���m�����s��׃�Ĺ��ψ��������⣬���y�������挦δ֪���ϕr�������֟o�ߣ��o�������ҵ�����ޏ�·����
����CRL�ڹ�������ϵ�y�еěQ��·������
��һ������Pϵ��ģ
�ڹ��I�C���˹�������ϵ�y�У�CRL������Ҫ���C�����\�Эh���е�����Pϵ�M�н�ģ��ͨ�^���������cϵ�y��B������������������ָ�������֮�g������Pϵ�������Y�����ģ�ͣ�SCM�������磬�������Â������������Д���ϵĿ���ԭ����늙C�^���������������^���ɢ�����
�������Q��·������
���ڽ��������ģ�ͣ�CRL�܉�ӑB�{���Q��·���������ϰl���r��ϵ�yͨ�^����������ٶ�λ����ԭ���Y�Ϗ����W���㷨���Ĵ������ܵ��ޏͲ������x���·�������磬��늙C���ψ����У�CRL���Ը�������ԭ���x���؆�늙C���{���������Q�����Ȳ��ԣ���ͨ�^ģ�M�͌��H�yԇ�����������ԡ�
�����������ӵ����m���W��
CRL��һ���@���������܉���δ֪����Pϵ����r�£�ͨ�^�����ӵķ�ʽ�W������Pϵ���ڹ��I�C���˹�������ϵ�y�У���ʹ��ʼ����Pϵ�����_��CRLҲ����ͨ�^�c�h���Ľ������W�������c�ޏͲ���֮�g������Pϵ���Ķ����F���m��������
�ġ�CRL�ڹ��I�C���˹�������ϵ�y�еđ��Ã���
��һ����ߛQ��Ч��
CRLͨ�^�������p���˛Q���^���еğoЧ�Lԇ���܉���ٶ�λ����ԭ���x����ޏ�·�����@�������˹�������ϵ�y��푑��ٶȺ��ޏ�Ч�ʡ�
����������ϵ�y������
CRL�܉��m�����s��׃�Ĺ��ψ�������ʹ���挦δ֪���ϕr��Ҳ��ͨ�^��������ҵ������Ľ�Q�������@�N������ʹ�ù��I�C�����ڏ��s�h�����\�и��ӷ�����
���������;S�o�ɱ�
ͨ�^�����Q��·����CRL�p���˹����ޏ�����ĕr�g���YԴ���Ķ������˾S�o�ɱ������⣬CRL�����m���W������߀���Ԝp�ٌ����ҽ�����ه��
�塢���a���Fʾ��
���˸��õ�����CRL�ڹ��I�C���˹�������ϵ�y�еđ��ã�������һ������Maze-based-CRL�Ĵ��aʾ����ԓ���aչʾ����Ό����֪�R���뵽�݆T-�uՓ��ģ���У�ͨ�^������탞���Q��·����
�h�����b
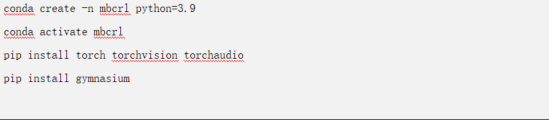
���]ʹ��conda���b̓�M�h�������]ʹ��Ubuntuϵ�y��
CRL���aʾ��
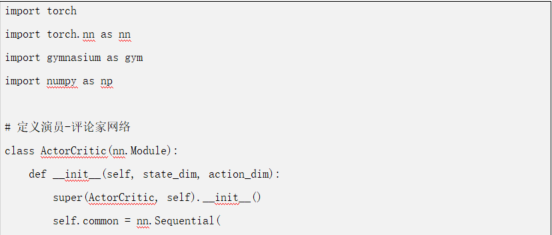
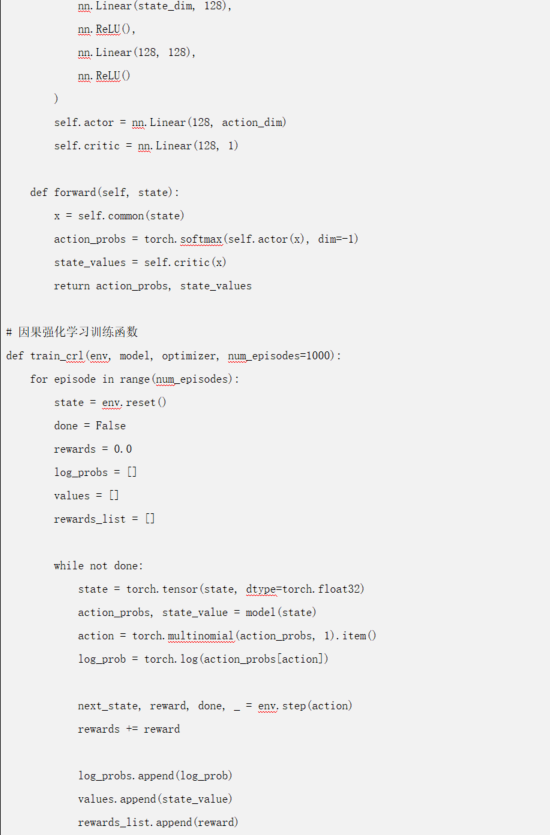
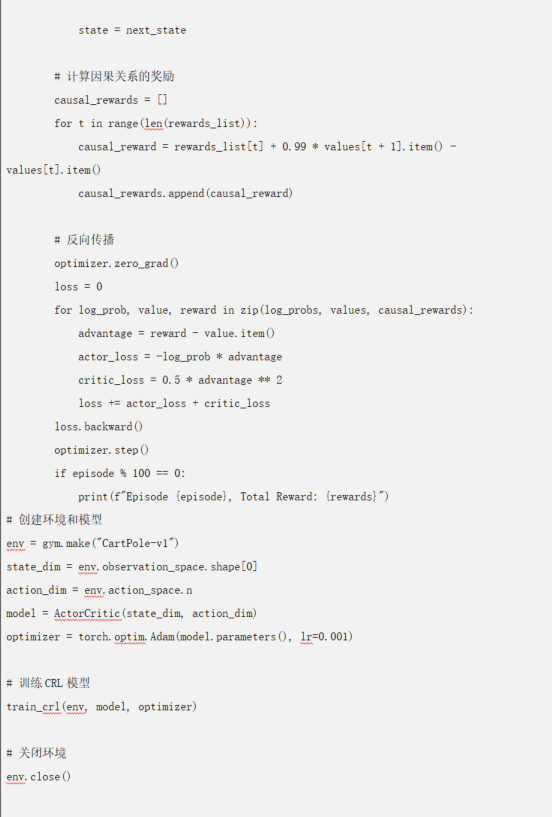
������һ��������CRL���aʾ����չʾ������ڹ�������ϵ�y�Ќ��F��������W����
CRL���aʾ��
������һ��������CRL���aʾ����չʾ������ڹ�������ϵ�y�Ќ��F��������W����
 �n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ���������ռ����g�ğo늳�Ƕ��ʽϵ�y�OӋ���ĭh�������������W����CRL���ڹ��I�C���˹�������ϵ�y�еěQǶ��ʽϵ�y�л���Ӳ����������AES-GCM�������܃�����Transformerģ��ϡ�軯Ӗ���c�������ټ��g���������ܼ����W���c�ğo��վͨ�š������ڷ���ɢ�����ģ���������g���ȣ�INT8�c���M�ƾW�j��BNN�� �ľ����c����CHERI�ܘ���Ƕ��ʽϵ�y�ȴ氲ȫ�C�Ʒ��o�о���W����߅���O���е��[˽���o�cͨ��Ч��ƽ���������RISC-Vָ��Č��r����ϵ�y�Д����ȼ��{���㷨��TLS 1.3 ���YԴ�����O���е��p�������F
�n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ���������ռ����g�ğo늳�Ƕ��ʽϵ�y�OӋ���ĭh�������������W����CRL���ڹ��I�C���˹�������ϵ�y�еěQǶ��ʽϵ�y�л���Ӳ����������AES-GCM�������܃�����Transformerģ��ϡ�軯Ӗ���c�������ټ��g���������ܼ����W���c�ğo��վͨ�š������ڷ���ɢ�����ģ���������g���ȣ�INT8�c���M�ƾW�j��BNN�� �ľ����c����CHERI�ܘ���Ƕ��ʽϵ�y�ȴ氲ȫ�C�Ʒ��o�о���W����߅���O���е��[˽���o�cͨ��Ч��ƽ���������RISC-Vָ��Č��r����ϵ�y�Д����ȼ��{���㷨��TLS 1.3 ���YԴ�����O���е��p�������F

